-
-
OpenEVSE supports many Serial TTL Devices at 5v on the 6 pin header.
-
The header is the common FTDI format.
-
Pin 1 - Ground (Black)
-
Pin 2 - No Connection
-
Pin 3 - 5v (Red) - 75ma max Higher power devices must use external power.
-
Pin 4 - Recieve (Yellow) connects to transmit on the remote device.
-
Pin 5 - Transmit (Green) connects to receive on the remote device.
-
It is recommended to update the latest version of firmware. Many changes have been made over time. This guide was written with Firmware version 3.7.8.
-
-
-
Insert the serial to USB adapt or and install the appropriate driver
-
The windows driver for the adaptor sold in the OpenEV store is here: Windows Driver
-
Using a terminal console (PuTTY recommended) set the COMM port to the USB-TTL adapter and the baud rate to 115200. Then click Open.
-
If you do not know the comm port you can go into the Device manager and look under Ports.
-
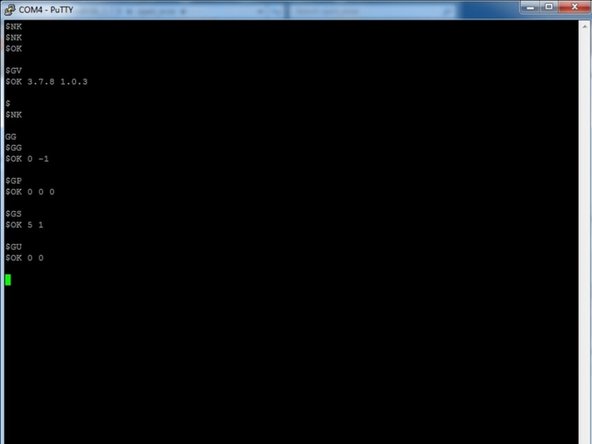
In the console window enter $ and press enter. You should receive a $NK response.
-
Next enter $SE 1. This will turn on local echo so you can see what you send. The response should be $OK.
-
Now enter the command $GV. The responce should be $OK followed br the Firmware version and the Remote API version.
-
-
-
Full documentation of RAPI is located in the rapi_proc.h file in the OpenEVSE Source code. The file is located here: rapi_proc.h
-
The Remote API is a very powerful too for extending OpenEVSE, useful for information, configuration and external applications.
-
Here are some interesting Get commands:
-
$GG - Get real time charging current. Returns $OK current voltage(future hardware)
-
$GP - Get real time Temprature values from RTC chip, MCP9808 and TMP007 IR sensors. Returns $OK RTC, MCP9808, TMP007 - 0 is returnd if sensor is not found.
-
$GS - Set EVSE State. Returns the current state $OK State - 1 Not Connected - 2 Connected - 3 Charging - 4 Error - 5 Error.
-
$GU - Get usage statistics. Returns $OK Energy used last session and lifetime
-
-
-
Full documentation of RAPI is located in the rapi_proc.h file in the OpenEVSE Source code. The file is located here: rapi_proc.h
-
The Remote API is a very powerful too for extending OpenEVSE, useful for information, configuration and external applications.
-
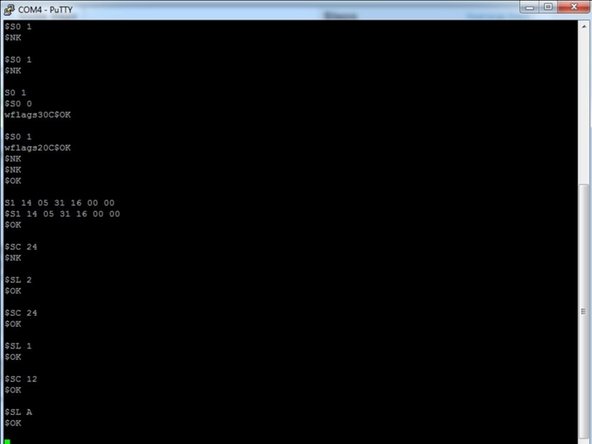
Here are some interesting Set commands:
-
$SC amp - Set current value in amps. Subject to Mix and Max for each setting min 6A Max 80A.
-
$SL 1 or 2 or A - set service level L1 /L2 / Auto
-
Tip you can set Service level 1 set current for L1 then set Service Level 2 and set current. Each has its own setting.
-
S1 yr mo day hr min sec - Set current time 2 digit value for each hour 24 hour value.
-
$S0 0 or 1 - Set LCD Type 0 = Monochrome 1 = RGB.
-
-
-
OpenEVSE can be extended with many devices using 5v TTL (or 3.3v with level shifting).
-
External power is required if device draws more than 75ma at 5v.
-